PREFACE
The fundamental theorem of algebra describes the advantages of the utilzation of the complex numbers and their conjugates.
Let another kind of complex number be as:
 , where
, where  ,
,  = horizontal axes ;
= horizontal axes ;  = vertical axis, and where
= vertical axis, and where 
 is not a Quaternion or other Cayley-Dickson construction.
is not a Quaternion or other Cayley-Dickson construction. 
we note that



But, Let assume
 , a complex number that replaces in a 2dimensional complex plane.
, a complex number that replaces in a 2dimensional complex plane.
Then we assume that the modulus
 can rotate in the closed set
can rotate in the closed set  .
To use instead of allows us to use three-dimensional space while maintaining the features of complex numbers.
So, that intrinsically includes
.
To use instead of allows us to use three-dimensional space while maintaining the features of complex numbers.
So, that intrinsically includes  except the cases where the interaxles angle is
except the cases where the interaxles angle is 
 ,
= integer, is a dependent variable and it is mobile in
all + plane ,
by assigning appropriate values at and . The position of can range in
by the infinite factors of
,
= integer, is a dependent variable and it is mobile in
all + plane ,
by assigning appropriate values at and . The position of can range in
by the infinite factors of
Then


Moreover if


 ,
,  ,
,  ,
, 




also by
 we have
we have  =
= 
also by
 we have
we have  =
= 
As
 hence we have
hence we have



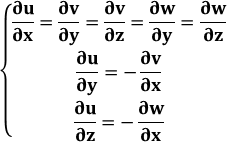
Holomorphy Conditions
and deriving partially by
on  , on
, on  ,
on
,
on  , we obtain
, we obtain

But if
in
 the Holomorphy conditions are the same in 2d-complex number:
the Holomorphy conditions are the same in 2d-complex number:

the Cauchy-Riemann equations in
 are
are 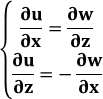 ,
,
deriving partially the first equation by
and the second equation by then
deriving partially the first equation by and the second equation by , we obtain 
and about
deriving partially the first equation by and the second equation by , we obtain  ,
,
instead, deriving partially the first equation by
and the second equation by , we obtain 
So we obtain the Laplacian on 3D on v-vector but not on u-vector neither w-vector . The laplacian equation is only on direction of axis
that links the north pole and south pole of the sphere  obtained by the Normed space consisting of vectors
obtained by the Normed space consisting of vectors  and
and  is the harmonic function of the laplacian equation on the v-vector
is the harmonic function of the laplacian equation on the v-vector
Trigonometric coordinates and Eulerian equations:



then

 ,
, 
then

If
 , then
, then  =
=  by Euler's identity
by Euler's identity
then also by De Moivre equations , with
= integer

 , (dot product)
, (dot product)

 , (dot product)
, (dot product)
Since

PI/4 approximately is 3.14159265358979/4 = 0.785398163397448

 , considering
, considering  hence
hence 


And if
 where
where 

How wrong are we in calculating the position of the point
and its vector?
we need to neutralize, as far as possible, the irrationality of to reduce the margin of error.
eg: the angle have value
 , then assuming is not a transcendental number and
not even an irrational,
then, the calculation of the value of the angle would be more exact.
in this case, the argument to be used for the calculation of the angles should be
, then assuming is not a transcendental number and
not even an irrational,
then, the calculation of the value of the angle would be more exact.
in this case, the argument to be used for the calculation of the angles should be  instead of
instead of
 .
.
So in other case which
could be non-irrational,
eg  ,
,  , the identification of the point position will be more precise.
, the identification of the point position will be more precise.